


تحلیل مدولار سیستمهای AGV چندگانه
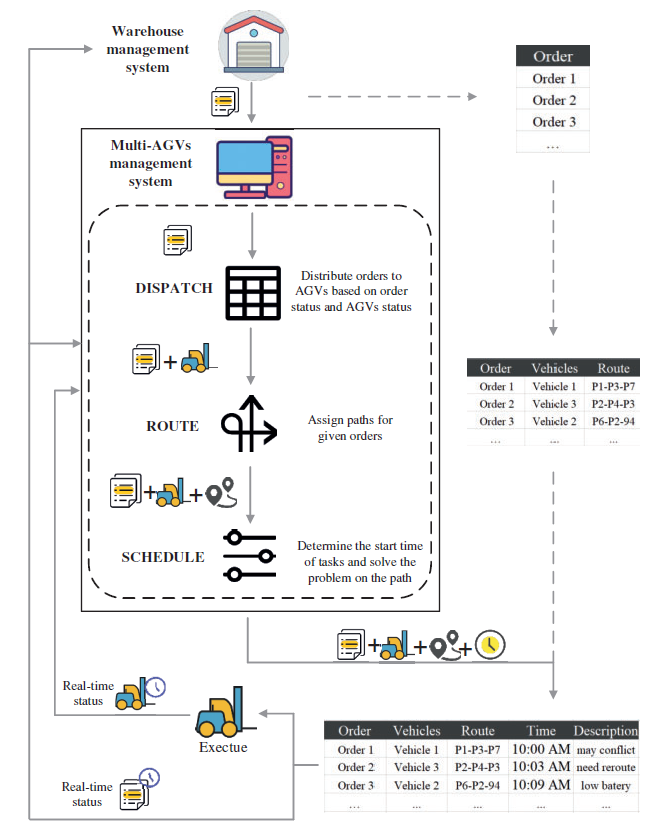
سیستمهای AGV (وسیله نقلیه هدایتشونده خودکار) چندگانه بهطور کلی به مجموعهای از AGVها اطلاق میشود که بهطور هماهنگ وظایف مشترک را انجام میدهند. این سیستم شامل فرآیندهایی از قبیل برنامهریزی, مسیریابی, و زمانبندی است که در کنار هم به هماهنگی بینظیری برای انجام وظایف مختلف در یک محیط پیچیده و پویا میپردازند. همانطور که در شکل زیر نمایش داده شده است، سیستم مدیریت انبار (WMS) بهعنوان مغز متفکر این فرآیند، سفارشها را به سیستم مدیریت AGV ارسال میکند و این سیستم مسئول هدایت هر AGV بهطور دقیق و بهموقع است. فرآیندهای اصلی این سیستم شامل سه بخش حیاتی است: برنامهریزی, مسیریابی, و زمانبندی.
ماژول برنامهریزی مسئول تخصیص سفارشها به AGVها بر اساس استراتژیهای خاص است و تصمیم میگیرد که کدام AGV وظیفهای را انجام دهد. این تصمیمات بهطور مستقیم به بهرهوری کلی سیستم مربوط میشود. در گام بعدی، ماژول مسیریابی با تعیین مسیرهای بهینه برای هر AGV، عملیات جابجایی را بهطور دقیق هدایت میکند. در سطح زمانی، ماژول زمانبندی همزمان با بررسی وضعیتها، تصمیم میگیرد که هر AGV در چه زمانی چه وظیفهای را انجام دهد و در صورت وقوع هرگونه مشکل مانند تداخل یا بنبست، چگونه آن را حل کند. دادههای حاصل از هر AGV که بهصورت آنی به سیستم مدیریت ارسال میشود، تضمین میکند که کل عملیات بهصورت روان و بیوقفه ادامه یابد. در صورت بروز هرگونه مشکل، سیستم بهطور خودکار وظیفه را مجدداً تخصیص میدهد تا بهراحتی و بدون وقفه ادامه یابد.
در این بخش، بهطور خاص به برنامهریزی پرداخته خواهد شد و جزئیات مرتبط با این فرآیند بررسی میشود. در مقالات بعدی ، به مسیریابی و زمانبندی خواهیم پرداخت و چگونگی تأثیر این ماژولها در بهینهسازی عملکرد کلی سیستم مورد بررسی قرار میگیرد.
برنامهریزی هوشمند و هدفمند
ماژول برنامهریزی مسأله ابعاد وظیفه را حل میکند و استراتژیای را بر اساس اهدافی که توسط مدیر تعیین شده است، اتخاذ میکند و تصمیم میگیرد که کدام AGV باید وظیفه خاصی را انجام دهد.
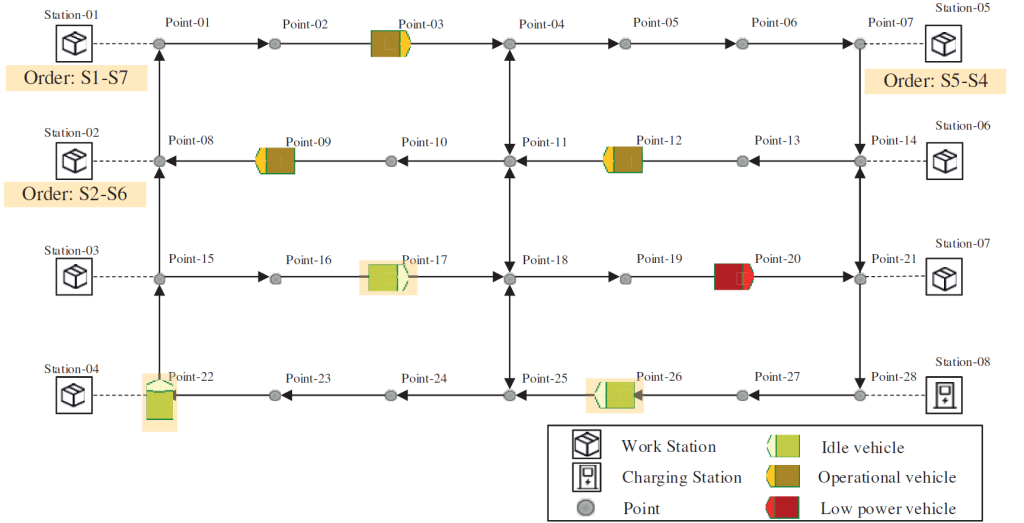
همانطور که در شکل زیر نشان داده شده است، سفارشها (که S2 نمایانگر ایستگاه-02 است) باید انجام شوند و AGVهای بیکار وجود دارند که باید توسط عملکرد برنامهریزی تخصیص داده شوند. سه سفارش وجود دارد: S1–S7، S2–S6 و S5–S4 که میتوانند وظایفی برای جابجایی کالا از یک ایستگاه به ایستگاه دیگر را نشان دهند. تعدادی AGV در وضعیت بیکاری در حال انتظار برای تخصیص سفارشها هستند.
استراتژی برنامهریزی به دو دسته استراتژیهای تکویژگی و چندویژگی تقسیم میشود. برای استراتژیهای تکویژگی، قواعدی مانند کمترین زمان/مسافت سفر (STT/D)، بیشترین اندازه صف (MQS) و بیشترین زمان انتظار (LWT) وجود دارد. برای قواعد چندویژگی، روشهای وزندهی ساده (SAWM)، روش تصمیمگیری چندویژگی یاگر (YAGER) و روش وزندهی افزایشی اصلاح شده (MAWM) وجود دارد.
مسأله برنامهریزی AGV به دو دسته تقسیم میشود: تخصیص وظیفه آغاز شده توسط خودرو و تخصیص وظیفه آغاز شده توسط مرکز کار. در روش اول، مسألهای که AGV وظیفهای را برای اجرا انتخاب میکند، معمولاً شامل یک AGV و چندین مرکز کار است. در این مورد، قواعدی مانند مرکز کار تصادفی (RW)، کمترین زمان/مسافت سفر (STT/D)، بیشترین زمان/مسافت سفر (LTT/D)، بیشترین اندازه صف خروجی (MOQS)، کمترین فضای باقیمانده در صف خروجی (MROQS) و اولین ورودی، اولین خروجی اصلاح شده (MFGPS) بحث شده است.
در روش دوم، مسألهای که در آن مرکز کار باید یک AGV بیکار را برای انجام وظیفه انتخاب کند، معمولاً شامل یک مرکز کار و یک یا چند AGV است. قواعدی مانند وسیله نقلیه تصادفی (RV)، نزدیکترین وسیله نقلیه (NV)، دورترین وسیله نقلیه (PV)، وسیله نقلیه با بیشترین مدت زمان بیکاری (LIV)، وسیله نقلیه با کمترین استفاده (LUV) وجود دارد.
بهطور کلی، استراتژیهای چندویژگی میتوانند اهداف بیشتری را نسبت به استراتژیهای تکویژگی پوشش دهند، به این معنی که میتوانند دو یا بیشتر از اهداف زیر را همزمان مدنظر قرار دهند: کاهش زمان انتظار، کاهش طول صف، کاهش مسافت سفر، افزایش بهرهوری و افزایش استفاده از وسایل نقلیه و ماشینآلات. در مقایسه با قواعد تکویژگی، استراتژیهای چندویژگی میتوانند مقاومتر باشند. این بخش همچنین به تفصیل به بررسی تخصیص وظیفه چندویژگی آغاز شده توسط AGV و تخصیص وظیفه چندویژگی آغاز شده توسط مرکز کار پرداخته است.
1. استراتژیهای تکویژگی
استراتژیهای برنامهریزی تکویژگی معمولاً ساده و قابل اجرا هستند. استراتژیهای رایج برنامهریزی تکویژگی شامل مواردی مانند نزدیکترین ایستگاه بهاولویت (NWF)، نزدیکترین وسیله نقلیه بهاولویت (NVF)، وسیله نقلیه با بیشترین مدت زمان بیکاری (LIV)، اولین ورودی، اولین خروجی (FCFS) و کمترین زمان سفر بهاولویت (STTF) هستند.
NWF استراتژیای است که توسط AGV آغاز میشود و AGVهای بیکار بهدنبال نزدیکترین ایستگاه برای انجام وظایف میگردند. معایب آن حساس بودن به طراحی نقشه است. به این معنا که احتمال دارد وظایف بهدلیل قرارگیری در نقاط خارج از مکانهای پر بازدید هرگز انجام نشوند. در NVF، مرکز کار وظیفه تخصیص را بر عهده دارد. به این معنی که AGV در دسترس که به مرکز کار نزدیکتر است، اولویت دریافت وظیفه را دارد. به این معنا که AGVهای دورتر از مرکز کار نمیتوانند از امکانات بهطور کامل استفاده کنند. FCFS ممکن است منجر به کاهش کارایی سیستم در حمل و نقل شود چرا که وسایل نقلیه بهاولویت درخواست زودتر (بار منتظر طولانیتر) تخصیص داده میشوند. در مقایسه با قواعد برنامهریزی فوق، زمانی که بار به مقدار آستانهای میرسد، AGVهایی که مدت زمان طولانیتری منتظر هستند در استراتژی نزدیکترین وسیله نقلیه با اولویت زمان (NVFTP) اولویتدار میشوند.
2. استراتژیهای چندویژگی
الف. استراتژیهای تخصیص وظیفه آغاز شده توسط وسیله نقلیه با ویژگیهای چندگانه
یک الگوریتم تعادل بار کاری برای حل مشکل تحویل وظیفه توسعه یافته است که تعیین میکند کدام کار باید به یک AGV اختصاص یابد. رویکردی چندویژگی برای برنامهریزی وظیفه آغاز شده توسط وسیله نقلیه پیشنهاد شد. این روش فضای باقیمانده در بافر خروجی یک ایستگاه، مسافت بین AGVهای بیکار و ایستگاه، و فضای باقیمانده در بافر ورودی مقصد کار را در نظر میگیرد.
در استراتژی چندویژگی، وزن هر ویژگی دشوار است که تعیین شود، به همین دلیل روشی پویا بر اساس شبکه عصبی توسعه داده شده است تا وزنها را در طول زمان تنظیم کند. علاوه بر این، از شاخصهای عملکرد مختلف برای مقایسه روشهای پیشنهادی با روشهای تکویژگی استفاده شده و برتری روش برنامهریزی چندویژگی را اثبات شده است.
روشی چندویژگی برای در نظر گرفتن زمان آزاد، زمان انتظار و مسافت پیشنهاد شده است. وظایف با سه ویژگی ارزیابی میشوند و وظایف با بیشترین ارزش ارزیابی توسط AGV انجام میشوند. مدلی مبتنی بر آموزش شبکه Q عمیق (DQN) برای تخصیص وظیفه با نزدیکترین نقطه شروع به AGV بیکار و کمترین تعداد وسایل نقلیه در مسیر برای بهبود زمان تکمیل و جلوگیری از تعارضات در حین عملیات ارائه شده؛ لازم به ذکر است روش شبکه عصبی نیاز به آموزش مجدد دارد زمانی که محیط تغییر میکند.
ب. استراتژیهای تخصیص وظیفه آغاز شده توسط مرکز کار با ویژگیهای چندگانه
تخصیص وظیفه آغاز شده توسط مرکز کار این است که انتخاب AGV بیکار برای یک وظیفه مشخص توسط سیستم صورت گیرد.
روشی برای برنامهریزی اولویت وسیله نقلیه مبتنی بر NVF ارائه شد که از اطلاعات جهانی و وضعیت فعلی برای تخصیص منابع استفاده میکند. استراتژی برنامهریزی پویایی پیشنهاد شد تا یک AGV مناسب برای انجام وظیفه با کاهش مسافت سفر کل و زمان انتظار پیدا کند. هم برنامهریزی وظیفه آغاز شده توسط وسیله نقلیه و هم برنامهریزی وظیفه آغاز شده توسط مرکز کار بررسی شده است.قوانین چندویژگی و قوانین وزن پویا مبتنی بر قواعد برنامهریزی تکویژگی سنتی: STTF و کمترین فضای باقیمانده در صف خروجی (MROQS) را پیشنهاد شده است. علاوه بر این، با شبیهسازی، استحکام قوانین را تأیید شده و روشی بدون بنبست برای برنامهریزی چندویژگی با وزنهای قابل تنظیم پویا (AWMA) در پیشنهاد شد.
مسافت سفر، وضعیت بافرهای ورودی و خروجی بهعنوان ویژگیهای برنامهریزی بر اساس کارایی و نیاز به اجتناب از بنبست انتخاب شدند. تعادل بار و اجتناب از بنبست با توجه به منابع سیستم در نظر گرفته شد. مکانیسم تخصیص دوگانه وظیفه بر اساس اولویت وظیفه و FCFS طراحی شد.
بهطور خاص، برای هر AGV یک توالی از وظایف پیکربندی شد که هر توالی شامل دو وظیفه بود: 1) وظیفه در حال اجرا، 2) وظیفهای که قرار است انجام شود. این به AGVها اجازه میدهد که همزمان وظایف مختلف را انجام دهند و منابع را بهطور بهینه تخصیص دهند.



){kind=link}
بدون نظر