

مقایسه تکنولوژیهای مسیریابی AGV و انتخاب بهترین گزینه
امروزه در بازار، فناوریهای متنوعی برای هدایت و رساندن رباتهای خودران (AGV) به مقصد وجود دارد. لازم است به این نکته اشاره شود که برای این کار روشهای مختلفی وجود دارد و هیچ راه درست یا غلطی در این زمینه نیست. تصمیمگیری به خود کاربرد بستگی دارد؛ به این معنی که به شرایط و نحوه استفاده از AGV مرتبط است.
برای هدایت AGV از نقطه A به نقطه B، فناوریهای مختلفی وجود دارد که شامل ناوبری کانتوری (ناوبری طبیعی)، لیزر رادار، هدایت نوری یا القایی و ناوبری شبکهای میشود. انتخاب هر یک از این فناوریها بیشتر به کاربرد و نیازهای خاص بستگی دارد.
هزینه ربات خودکار نیز میتواند به عنوان یک شاخص کلی برای تعیین روش مناسب هدایت مورد استفاده قرار گیرد. به طور کلی، هزینه فناوری هدایت نباید بیش از ۵٪ از قیمت AGV باشد. به عنوان مثال، برای یک AGV با قیمت ۱۰,۰۰۰ یورو، استفاده از ناوبری کانتوری و لیزر رادار به دلیل هزینه بالاتر از حد مجاز ۵۰۰ یورو، امکانپذیر نخواهد بود.
یکی دیگر از عوامل تعیینکننده برای انتخاب نوع فناوری، نوع وسیله نقلیه است؛ به عنوان مثال، آیا AGV یک وسیله نقلیه حامل بار از زیر(جایگزین لیفتراک) است یا یک وسیله نقلیه پلتفرمی. وسیلههای حامل بار از زیر بهطور خاص برای حمل بار از زیر آن قرار گرفته و بار را بالا میبرند و طراحی آنها با استفاده از فناوریهایی مانند لیزر رادار سازگار نیست. اما وسایل نقلیه پلتفرمی، بار را روی پلتفرم خود حمل میکنند و روشهای هدایت مختلفی را پشتیبانی میکنند.
در ادامه، هر یک از فناوریهای ناوبری و کاربردهای آنها به تفصیل بررسی میشوند:
مسیریابی کانتوری (ناوبری طبیعی)
مسیریابی کانتوری یا همان ” طبیعی” پیچیدهترین و همچنین پرهزینهترین نوع سیستم هدایت است، اما در عین حال دارای انعطافپذیری و دقت بالایی است. اگر نیاز به تغییر سریع مسیر حملونقل باشد، این تغییر بهراحتی و با یک کلیک در نرمافزار مدیریتی قابل انجام است. به دلیل قرارگیری سنسور نزدیک به سطح زمین، این روش برای وسایل نقلیه بلندکننده خودکار و تراکتورها و نیز برای وسایل نقلیه پلتفرمی و حامل بار از زیر مناسب است. برای این نوع مسیریابی نیازی به ابزارهای اضافی مانند منعکسکنندهها، علائم نوری یا ردیابی مغناطیسی نیست.
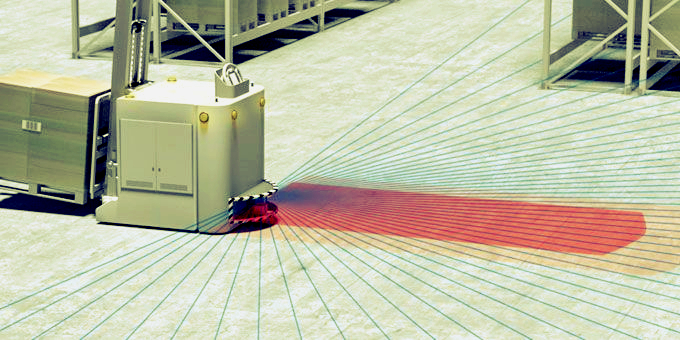
لیزر رادار
مسیریابی با استفاده از لیزر رادار از نظر انعطافپذیری مشابه مسیریابی کانتوری است، اما نیاز به اتصال نوری سنسور به منعکسکنندهها دارد. هر سنسور باید به اندازهای بالا نصب شود که همواره دید مناسبی به منعکسکنندهها داشته باشد. اگر اتصال به منعکسکنندهها قطع شود (مانند ورود به یک راهرو)، AGV باید به یک نوع دیگر مسیریابی تغییر یابد. این امر، تغییر مکان به فضای دیگر را در صورت نیاز دشوارتر کرده و انعطافپذیری را محدود میکند.
هدایت نوری و القایی
هدایت نوری و القایی معمولاً سیستمهای سادهای هستند که از یک مسیر از پیش تعیینشده پیروی میکنند. این روشها از نظر انعطافپذیری محدود هستند، اما یک راهحل اقتصادی به حساب میآیند. به دلیل قرارگیری سنسور نزدیک به سطح زمین، این نوع ناوبری با هر نوع وسیله نقلیهای سازگار است.
مسیریابی شبکهای
در مسیریابی شبکهای، اطلاعات در یک شبکه از پیش تعیینشده روی سطح یا درون آن قرار میگیرند، مانند کدهای دوبعدی یا تگهای شناسایی. با استفاده از اطلاعات دریافتی در حین عبور از نقاط مختلف شبکه، AGV میتواند بین نقاط مختلف شبکه حرکت کند و به مقصد مشخص شده برسد. این نوع مسیریابی برای سطوح صاف و غیر آلوده به فشارهای سنگین مناسب است.
کدام روش مسیریابی برای کاربرد خاص شما مناسبتر است؟
ارزیابی و توصیه عمومی برای انتخاب روش مسیریابی مناسب تنها در ترکیب با عملکرد AGV در کاربرد مشخص قابل تعیین است. در شرکت ما، با استفاده از دانش فنی و تجهیزات پیشرفته، میتوانید انواع سیستمهای مسیریابی و حملونقل AGV با کارایی و دقت بالا را تهیه کنید. با ما تماس بگیرید تا برای کسب و کار خود از آخرین فناوریهای مسیریابی بهرهمند شوید.



{kind=link}
بدون نظر